
Edoardo Amaldi, ravitailleur de l’ISS
Qu’est-ce que Jules Vernes, Johannes Kepler, Edoardo Amaldi, Albert Einstein et Georges Lemaïtre ont en commun ? Un est écrivain, deux sont physiciens et deux sont astronomes. Ce ne sont donc pas leur profession. Leur point commun est la station spatiale internationale. En effet ces illustres personnages ont été choisis pour ravitailler l’ISS, ou plus exactement ils ont donné leur nom aux cargos européen ATV (Automated Transfer Vehicule) de ravitaillement de l’ISS.

A gauche l’ATV (sans les panneaux solaires déployés) et à droite le module de service russe Zvezda (qui fait partie de l’ISS) (Photo prise au Centre d’entraînement des astronautes européens (EAC) à Cologne en Septembre 2011)
Après l’ATV Jules Vernes en 2008, l’ATV Johannes Kepler en 2011, ce sera au tour de l’ATV Edoardo Amaldi de prendre la direction de la station spatiale le 23 mars prochain. Quant aux deux derniers véhicules, ils seront lancés en 2013 et 2014.
L’ATV se présente sous la forme d’un cylindre équipé de panneaux solaires et de propulseurs et comme ses initiales l’indiquent, il est capable de s’amarrer automatiquement à la station spatiale. Il est lancé par une fusée Ariane 5 depuis Kourou.
Il est composé d’un compartiment pressurisé qui contient la cargaison « sèche » (d’une masse de 2,2 Tonnes pour l’ATV3 Edoardo Amaldi) et d’un compartiment non pressurisé dans lequel se situe les réservoirs d’eau, d’oxygène et d’ergols (carburants/comburants) pour le système de propulsion de la station. La cargaison « liquide » fait près de 4,4T (dont 3T prévue pour la réhausse de la station), soit un total de 6,6T.
")
Compartiment pressurisé de l’ATV (Cologne, EAC – Septembre 2011)
Le compartiment pressurisé de l’ATV contient du matériel pour les expériences scientifiques, des pièces de rechange pour la station, de la nourriture et des affaires personnels pour les astronautes.
L’ATV s’amarre à l’extrémité russe de la station spatiale, c’est à dire au module Zvezda à bord duquel deux astronautes vont contrôler que tout se déroule de façon nominale grâce aux caméras placées à l’extérieur de la station et qui retransmettent l’approche sur un écran.

Console de l’ATV à l’intérieur du module Zvezda (Cologne, EAC, Septembre 2011)
En cas de problème ils ont la possibilité, tout comme le Centre de Contrôle de l’ATV à Toulouse (ATV-CC), d’agir sur l’amarrage, grâce à une console située à bord du module russe.

Panneau de contrôle de l’ATV (Cologne, EAC, Septembre 2011)
Les astronautes ont 16 boutons à leur disposition, mais seulement 4 peuvent agir sur la trajectoire de l’ATV (Les autres boutons commandent entre autre chose les caméras).
Les deux boutons principaux de la console sont ABORT et ESCAPE. Tous les deux interrompent l’amarrage et le reporte pour au moins 24h.
L’ATV est envoyé loin de la station à 4m/s (14,4km/h) pour le bouton ESCAPE et 5m/s (18km/h) pour le bouton ABORT.
Le bouton HOLD permet de faire une pause dans l’approche et de conserver le véhicule dans sa position actuelle.
Le bouton RETREAT permet de donner l’ordre au véhicule de faire marche arrière pour rejoindre sa précédente position (Le véhicule va s’arrêter à quatre reprises au cours de la phase d’approche).
")
Tableau récapitulatif en cas de problème (Cologne, EAC, Septembre 2011)
Les deux astronautes à bord de l’ISS peuvent déterminer quel bouton appuyer en fonction des dysfonctionnements constatés et de la distance de l’ATV à la station grâce à un tableau récapitulatif.
En parallèle des indications lisibles sur l’écran, l’équipage peut contrôler à tout moment à quelle distance se situe l’ATV en utilisant une réglette graduée qu’ils plaquent sur l’écran. Pratique très étonnante à l’ère du tout informatisé ? Pas complètement : le but est de s’affranchir des systèmes informatiques et de pouvoir être sûr de la distance exacte.
Le même système de contrôle est utilisé pour l’amarrage des cargos européens et des cargos russes (les cargos Progress).
L’ATV Edoardo Amaldi va rester amarré à la station spatiale pendant 6 mois durant lesquels il rehaussera la station spatiale de plusieurs kilomètres : à cause de l’atmosphère résiduelle présente à cette altitude (entre 350 et 400km), la station spatiale est freinée et cela entraîne une perte d’altitude d’environ 100m par jour. La station possède son propre système de propulsion et se réhausse régulièrement, mais cela ne compense pas la perte totale et c’est l’ATV et le cargo russe Progress qui sont chargés de réaliser les réhausses manquantes. Pour effectuer cette tâche l’ATV transporte près de 3T de carburant.
Et pour finir, au cours de son séjour amarré à l’ISS, sa partie pressurisée sera remplie de tout ce dont les astronautes veulent se débarrasser, principalement des emballages, et l’ensemble sera brûlé au cours de sa ré-entrée dans l’atmosphère à près de 7km/s.
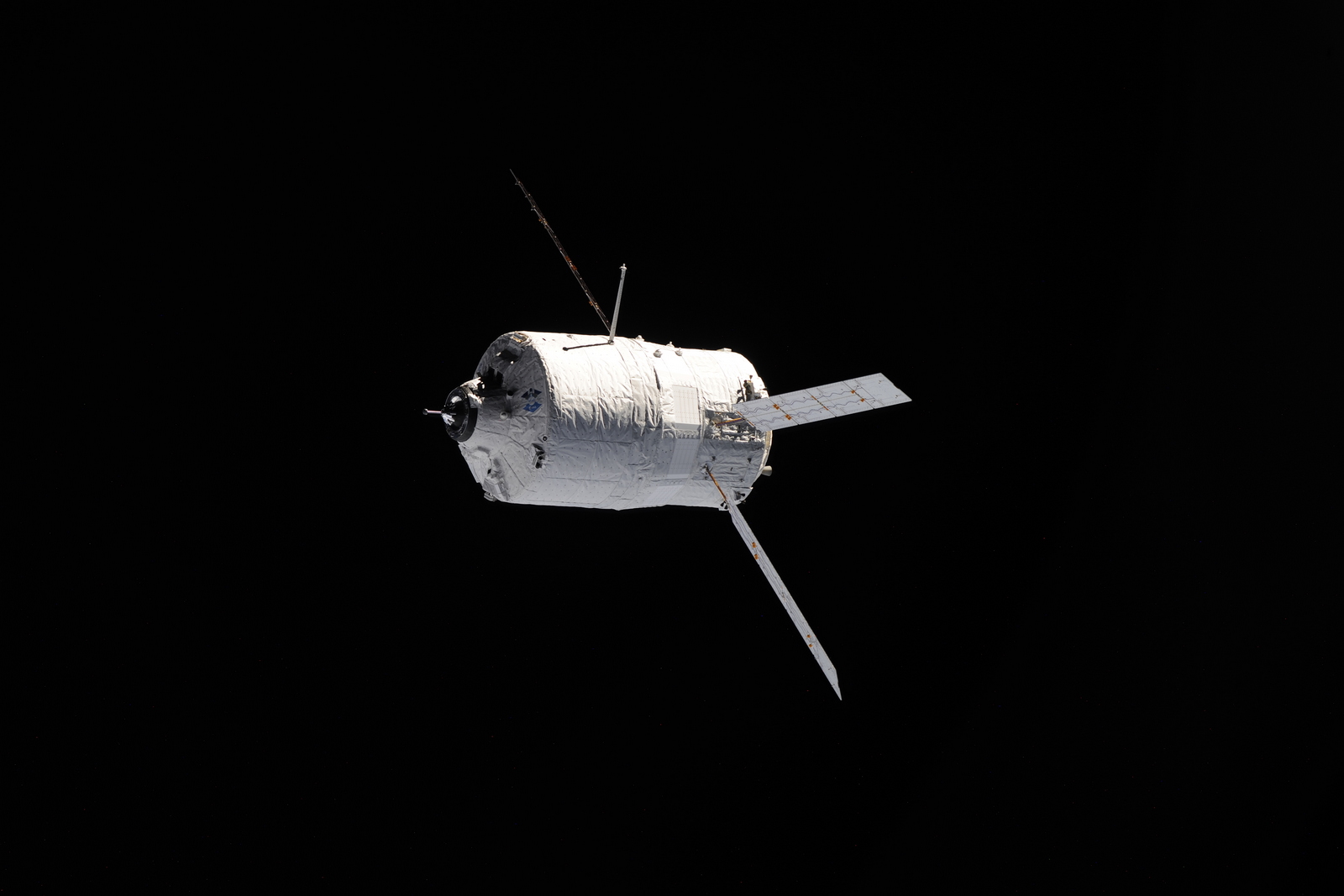
L’ATV Johannes Kepler, à l’approche de l’ISS pour son amarrage (Credits : ESA/NASA)
Le lancement de l’ATV est programmé au vendredi 23 mars 2012 à 4:31am GMT (5h31 heure de Paris).
Pour en savoir plus, je vous invite à lire ce kit d’information en français édité par l’ESA. Et retrouvez-moi sur twitter (@cpamoa) le soir de l’amarrage pour vivre avec moi en direct du centre spatial de Toulouse l’amarrage de l’ATV à la station spatiale internationale (et suivez le hashtag #ATVTweetup)