HTV-5 : Lancement réussi de la cigogne blanche !

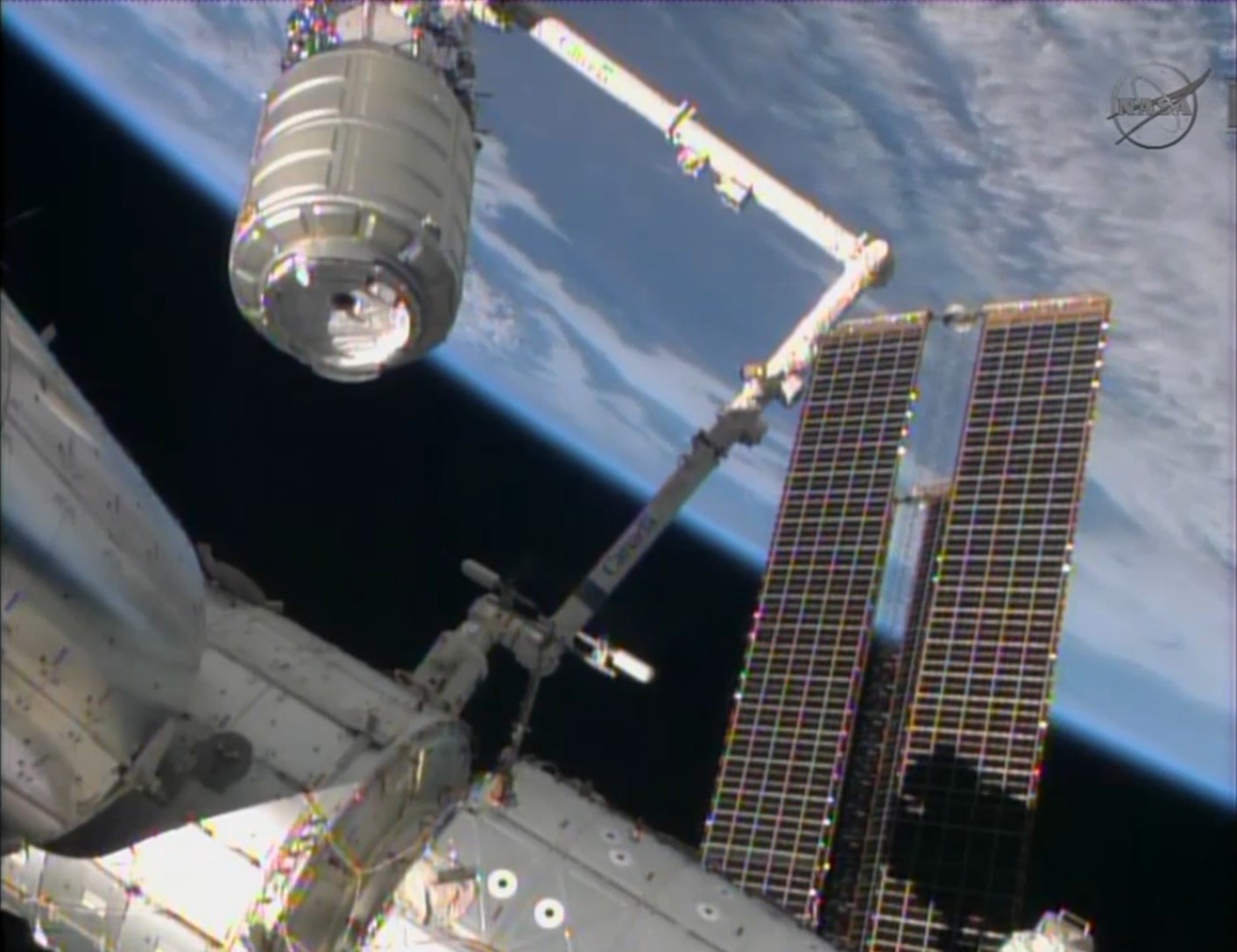
Le titre de cet article vous semble énigmatique ? Pas de panique, je vous explique ! Le HTV c’est le cargo de ravitaillement de l’ISS développé, construit et lancé par les japonais. HTV signifie H-II Transfer Vehicle. Et comme ce nom technique était certainement… trop technique, les japonais lui ont donné un deuxième nom : Kounotori, qui signifie cigogne blanche en hommage à sa mission de livraison. Ce ne sont pas des bébés que Kounotori va livrer à l’ISS, mais