
L-146 : Entraînement robotique et EVA au laboratoire de Réalité Virtuelle
L-146 : Mardi 1er juillet 2014
Hier nous avons eu un entraînement plutôt spécial au laboratoire de Réalité Virtuelle. Terry, Butch, Anton et moi, étions réunis pour la pratique de l’une des chorégraphies complexes dans laquelle nous utilisons le bras robotique pour soutenir une sortie spatiale.
Dans notre scénario, Butch et Terry étaient au départ les astronautes en EVA, ce qui, dans le laboratoire de réalité virtuelle signifie qu’ils portaient les lunettes et les gants, qu’il se déplaçaient dans le scénario de la Station Spatiale virtuelle et qu’ils interagissaient avec elle.

J’étais l’opérateur robotique et je pouvais en fait observer leurs mouvements virtuels sur les vues de ma caméra. Anton était là pour aider principalement avec le balayage, l’inclinaison et le zoom de la caméra, un rôle que nous appelons Assistant de la station de travail robotique.
Dans notre scénario, nous avions affaire à un module de pompe défaillant, qui avait déjà été remplacé lors d’une précédente EVA et était rangé provisoirement sur le POA – c’est comme un effecteur robotique, mais il est à une position fixe sur la Station. Nous pouvons installer un dispositif de grappin sur un module de pompe de sorte que le POA peut se fixer dessus.
J’ai d’abord suivi les instruction GCA de Butch pour manœuvrer le bras dans une position dans laquelle il pourrait s’insérer dans le cale-pied qui, dans notre simulation, était déjà attaché à l’effecteur robotique. Vous pouvez consulter cet ancien article du journal si vous ne savez pas ce qu’est le GCA : L-485 : Pilotage du bras robotique.
Puis je l’ai transporté vers le POA. Une fois que Butch était en mesure de pouvoir tenir les poignées du module de pompe, nous avons libéré l’unité du POA et j’ai programmé une séquence automatique pour l’emmener vers une plate-forme de stockage externe, l’ultime lieu de stockage de l’unité défaillante.
A ce moment-là nous avons échangé nos places : Terry a pris le bras robotique, tenant virtuellement le module de pompe, et je suis devenue l’EV2, en aidant à conserver les distances et en fournissant les instructions GCA pour insérer le module de pompe dans les rails de guidage de sa « boite » de stockage.
Le laboratoire de Réalité Virtuelle est tout spécialement utile pour pratiquer la coordination et la communication, qui sont les clés des opérations combinées EVA/robotique réussies qui se déroulent bien. En outre, l’environnement de réalité virtuelle fournit une représentation réaliste des conditions d’éclairage. De nuit, cela peut être difficile d’avoir une bonne vue de la totalité du bras robotique et de toutes les distances !
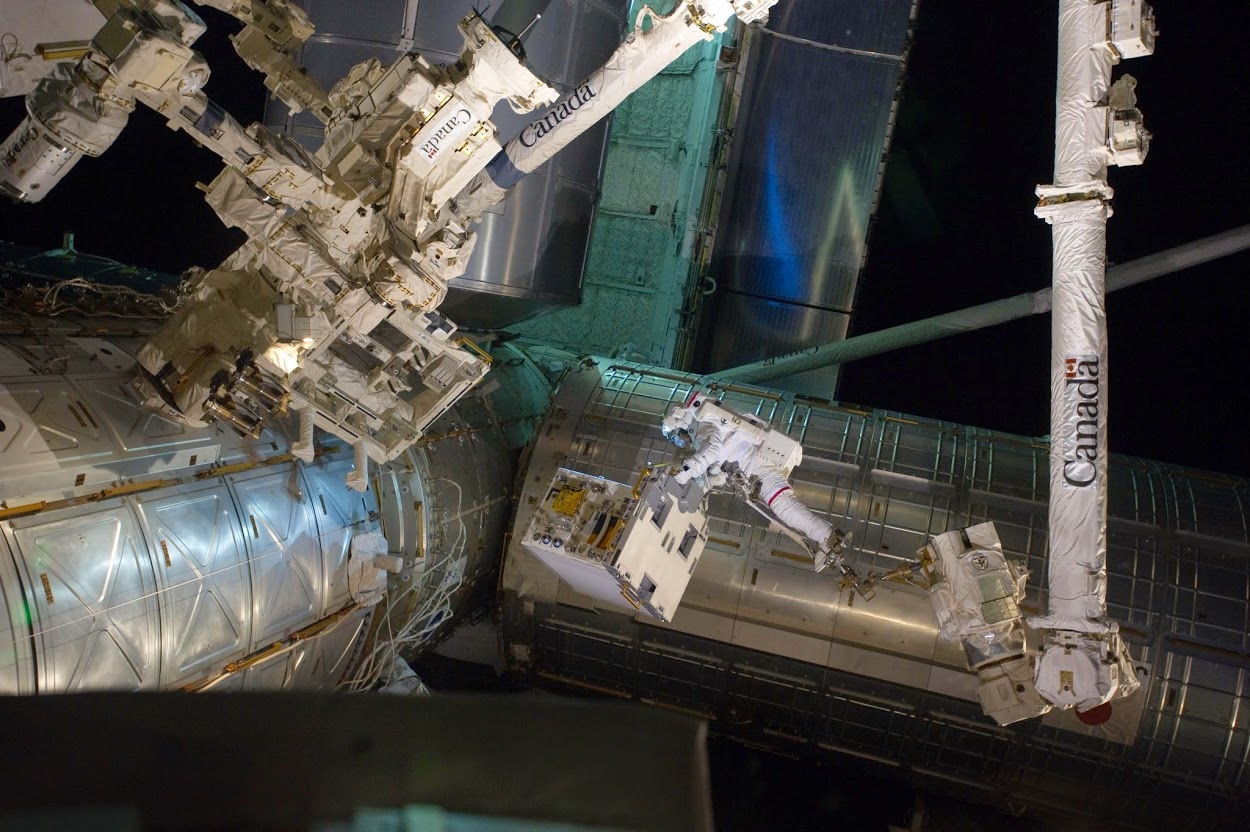
En juillet 2011 pendant une EVA, Ron Garan transfert un module de pompe dans la soute de la navette Atlantis
Photo : un astronaute en EVA manipulant un module de pompe dans l’espace il y a quelques années. Tout comme dans notre scénario, il est attaché à la fin du bras.
Cette note est la suite d’une longue série de notes de Samantha Cristoforetti qui a entrepris l’écriture d’un journal de bord quotidien qui la mènera au jour de son lancement, pour le moment prévu le 24 novembre 2014.
La version anglaise (originale) peut être consultée sur son compte Google+ et la traduction italienne sur le site AstronautiNEWS. Toutes les photos postées sont sa propriété et proviennent de son journal de bord sur son compte Google+.