Cygnus : Premier vol commercial de ravitaillement de la Station Spatiale Internationale

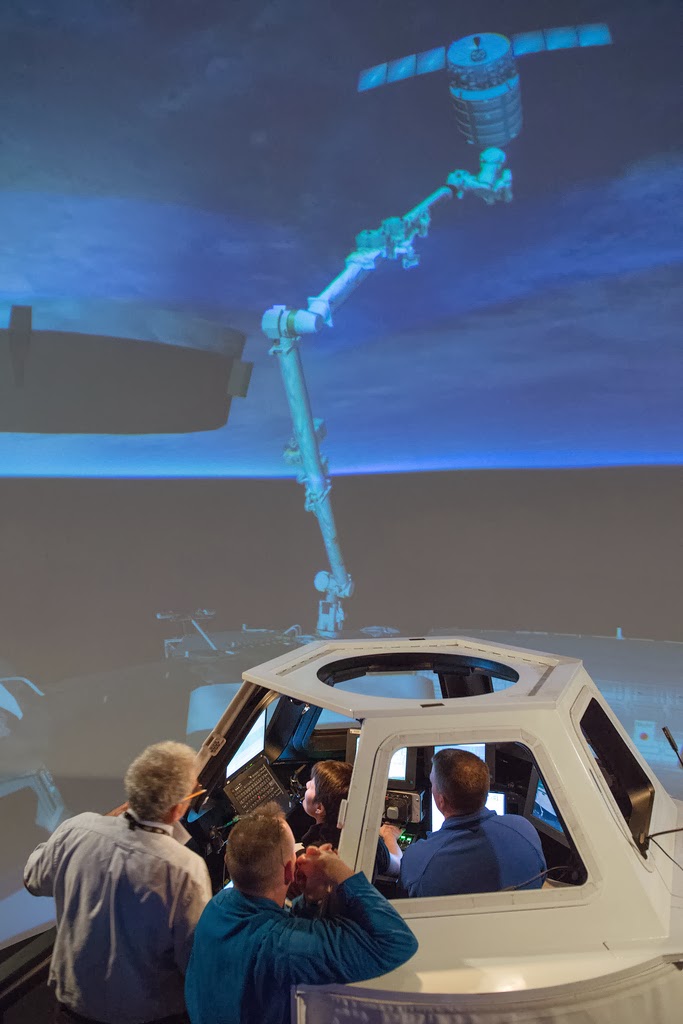
Ce dimanche 11 janvier, Cygnus, le vaisseau cargo de la société privée américaine Orbital Sciences va être amarré à la Station Spatiale Internationale. Si vous avez le temps, regardez la retransmission sur NASA TV : les rendez-vous et les amarrages donnent lieu en général à de chouettes vidéos de la Terre vue de l’espace. C’est à suivre en direct à partir de 11:00 CET (10:00 UTC). Le bras robotique de la Station, le Canadarm2, doit agripper le vaisseau vers 12:02