
Escaliers extérieurs et gymnastique du cerveau
Article par Samantha Cristoforetti

J’adore les escaliers extérieurs à Montréal (Credit : ESA/Samantha Cristoforetti)
Je suis à Montréal depuis une semaine, résidant dans le charmant quartier du Plateau Mont-Royal et passant des journées entières de formation robotique à l’Agence Spatiale Canadienne.
Jusqu’à présent je ne me suis pas écartée du trajet qui me mène au travail, sauf pour la brève balade vers les Cafés des environs pour le petit-déjeuner, un petit rituel quotidien qui s’est décalé progressivement plus tard dans la matinée au fur et à mesure où je digérais le décalage horaire de six heures avec l’Europe. J’ai pris un grand plaisir à explorer les petites rues pittoresques bordées d’arbres et de rangées de maisons, toutes avec une façade identique et avec un escalier extérieur menant à une entrée indépendante au premier étage. Droit ou courbé, simple ou élaboré, rigoureusement en métal avec des marches ouvertes, ces escaliers extérieurs évoquent un dynamisme qui correspond aux moyens d’existence haut en couleur du voisinage.

Avec le collègue canadien David Saint-Jacques et une maquette taille réelle du Canadarm2. Chaque perche fait 7m de long, mais c’est un matériel incroyablement léger. (Credit : CSA)
C’est une façon agréable de commencer la journée avant de prendre le chemin des installations de l’Agence Spatiale Canadienne pour la formation sur le système manipulateur robotique de la Station Spatiale (ou SSRMS : Space Station Robotic Manipulator System). Le Canadarm2 pour les intimes. Pour le cas où vous vous demanderiez comment une structure de 400 Tonnes a été assemblée en orbite, la réponse courte est : pièce par pièce, avec l’aide du SSRMS.
Vous pouvez imaginer le Canadarm2 comme une réplique robotique de votre propre bras dans une taille plus grande. Il a une épaule, un coude et un poignet. Comme votre bras, il dispose de deux perches droites entre les articulations. Et comme votre bras il peut plier le coude et il peut tourner l’épaule et le poignet dans presque toutes les directions. En terme d’ingénierie cela signifie qu’il a sept degrés de liberté, bien que nous pouvons verrouiller un degré de liberté pour forcer le bras à se déplacer d’une manière plus contrôlée. La station est précieuse : la heurter n’est pas envisageable.
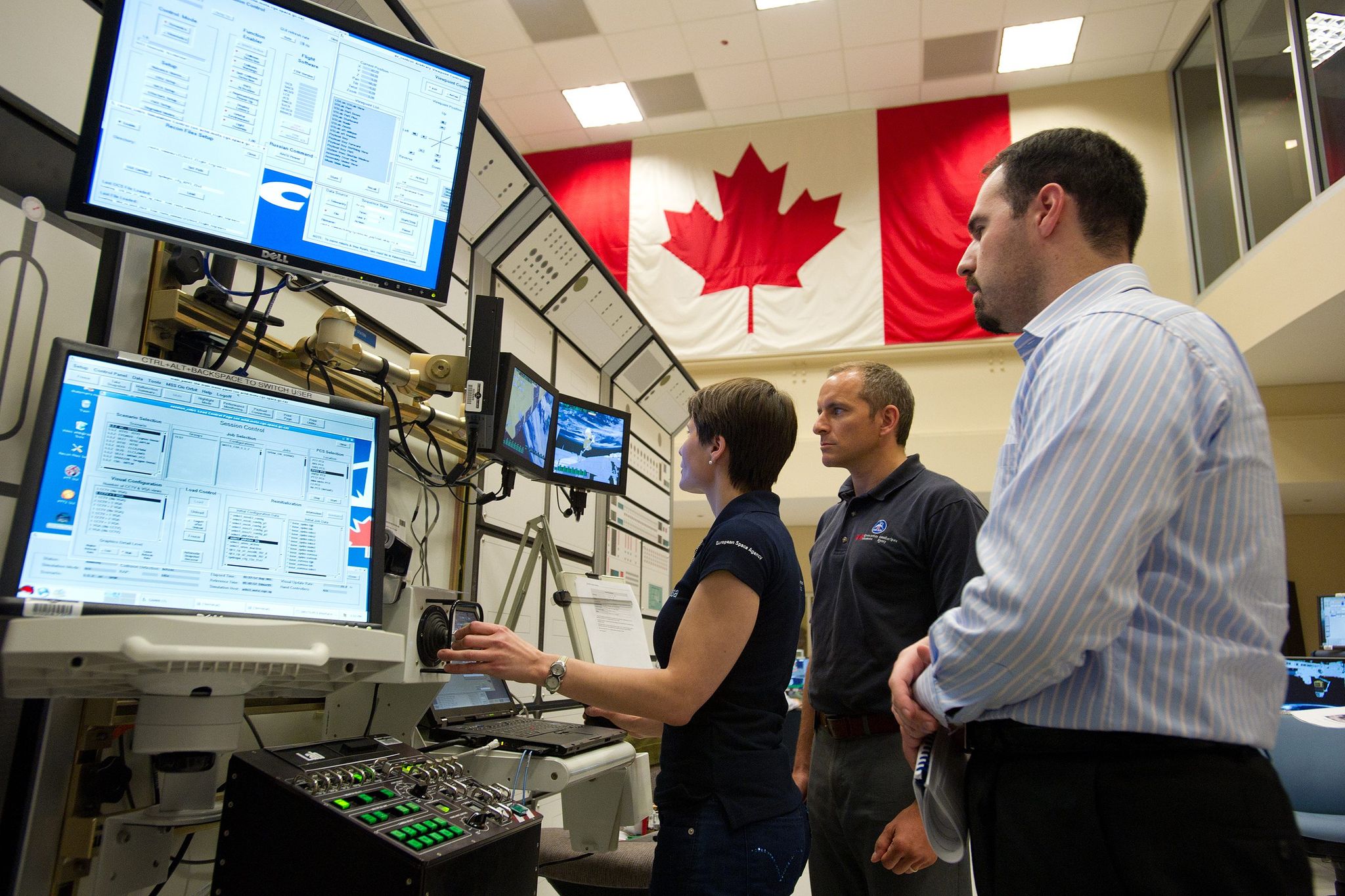
Travail à la station de travail robotique. Les deux moniteurs concernent le simulateur et ne sont pas présents en orbite. Les instructeurs les utilisent pour exécuter la simulation (Credit : CSA)
Pour former les futurs membres d’équipage aux opérations du SSRMS l’Agence Spatiale Canadienne possède des stations de travail robotique qui sont identiques à celles présentes en orbite. Il y a des commandes manuelles pour la translation et la rotation, un ordinateur et un panneau de contrôle pour configurer le système et entrer les commandes, et trois moniteurs pour les images de la caméra. Il n’y a pas de bras réel, bien sûr, mais le logiciel de simulation tourne en tâche de fond et les vues de la camera vous montrent exactement ce que vous verriez si vous pilotiez le bras en orbite.
Une séance de simulateur typique peut commencer par ce qui pourrait ressembler à jouer avec un jouet. Sur un modèle réduit du bras robotique nous reproduisons la configuration initiale basée sur les déflexions données de chaque articulation. Je vois ça comme un exercice d’échauffement pour le cerveau.

Placement du Canadarm2 sur le modèle de l’ISS dans une position et une configuration correcte. L’accessoire que tient David est utile pour visualiser les cadres de coordonnées (Credit : CSA)
Si vous êtes un constructeur de modèles réduits, vous allez adorer ce qui suit : pour pouvoir visualiser le mouvement du bras par rapport à la station spatiale, nous avons un prototypage rapide d’un modèle réduit considérablement détaillé de la Station Spatiale juste à coté de la station de travail du simulateur. Je trouve que cet objet a une beauté intrinsèque, je dois avouer. Mais c’est bien sûr voulu comme un outil de visualisation et comme une aide pour la gymnastique importante du cerveau à venir : retourner mentalement les images de la camera, prévoir comment sera le mouvement du bras à partir de différents points de vue, identifier la meilleure combinaison de la camera pour surveiller les espaces près de la structure, déterminer les données du contrôleur de main dans différents cadres de coordonnées, visualiser les mouvements des articulations – ce sont quelques-unes des tâches qui sont sûres de garder votre cerveau sur le qui-vive pendant que vous pilotez le bras.

Après une semaine de formation, je commence à être familière avec les opérations SSRMS nominales de base. Je suis maintenant impatiente d’apprendre la semaine prochaine les situations non-nominales telles que les singularités et les auto-collisions, ainsi que la pratique des captures d’objets flottants, qui consiste à manœuvrer le bras pour attraper un véhicule qui n’est pas attaché à la station spatiale.
Vous pouvez vous attendre à ce que les captures d’objets flottants deviennent de plus en plus fréquents dans l’ISS dans les prochaines années. Non seulement les astronautes vont continuer à capturer et amarrer le vaisseau de ravitaillement japonais HTV, mais ils vont bientôt commencer à faire la même chose avec les véhicules de ravitaillements commerciaux américains Dragon et Cygnus. La première capture du vaisseau Dragon se produira prochainement, et je pense que cela sera un moment historique. Assurez-vous de regarder !
Cet article a été écrit par Samantha Cristoforetti, l’un des six astronautes recrutés par l’Agence Spatiale Européenne en 2009. Leur groupe a été baptisé les Shenanigans. Vous pourrez lire la version originale de cet article en anglais sur le site de l’ESA ici : Outdoor staircases and brain gymnastics